Intelligent micro-robotic systems
There is significant debate among researchers regarding the definition of micro-robotic systems. In our laboratory, we define them with the following requirements:
- Remote wireless control of microrobots;
- Programmable initiation, execution, and termination of complex tasks;
- Motion precision at the micrometer scale;
- Capability for multifunctional payloads.
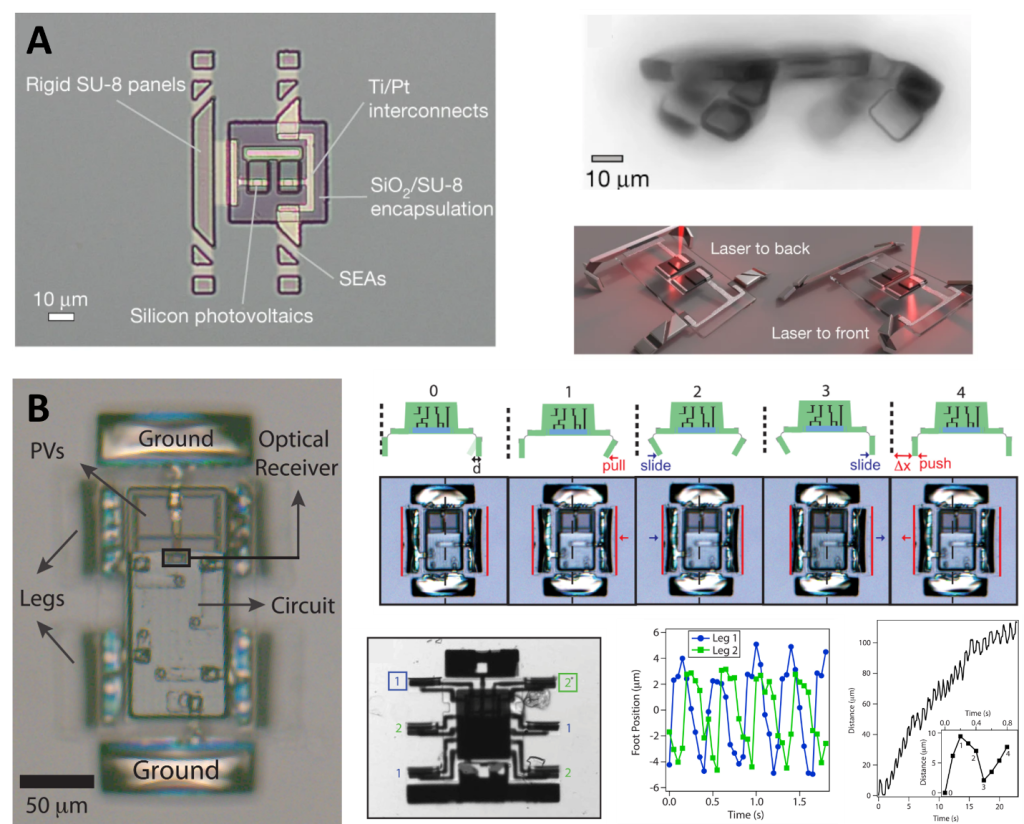
In our preliminary research, we integrated photovoltaic cells and control circuits into micrometer-scale robots, enabling them to move under laser illumination. The specific mechanism of robotic arm actuation can be referenced in the “actuator materials” section of Robotic Materials. Under the influence of the control circuit, the photocurrent signal successfully guided the microrobots to execute complex instructions, marking a significant step towards intelligent micro-robotics.
Imagine how challenging it is to use an ordinary tweezer to pick up a single strand of hair. With micrometer-scale robots, we can even send commands for them to manipulate or capture cells ten times thinner than a strand of hair.
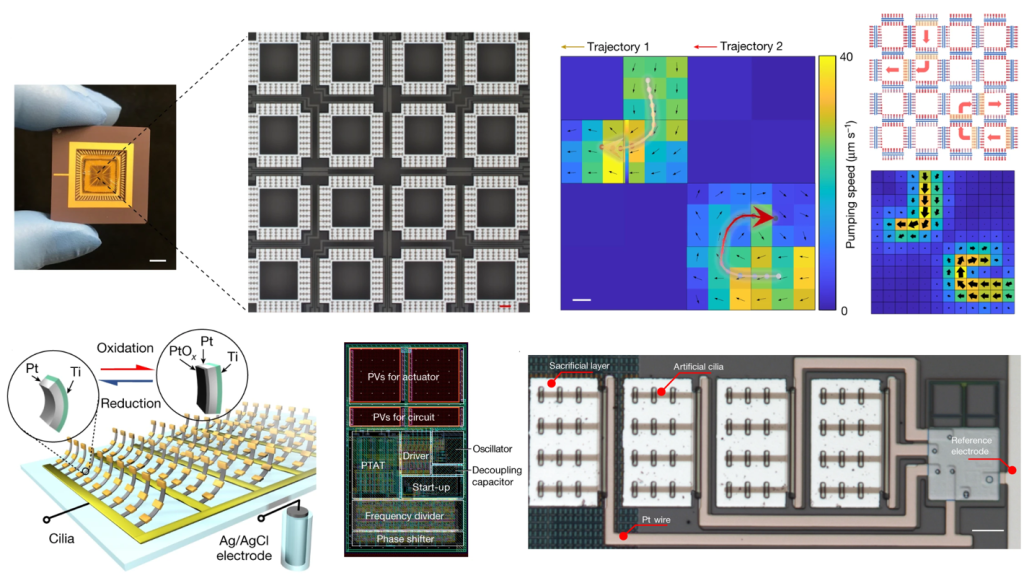
In microscopic environments, the capabilities of intelligent microrobots go far beyond the functions mentioned above. In another preliminary study published in Nature, inspired by intestinal cilia, we utilized a chip to control hundreds of micro-actuators en masse, regulating microfluidic motion. This allowed targeted chemical substances to reach designated locations through controlled fluid flow.
Applications like these reinforce our belief that intelligent microrobots will play a transformative role in clinical, medical applications and beyond.